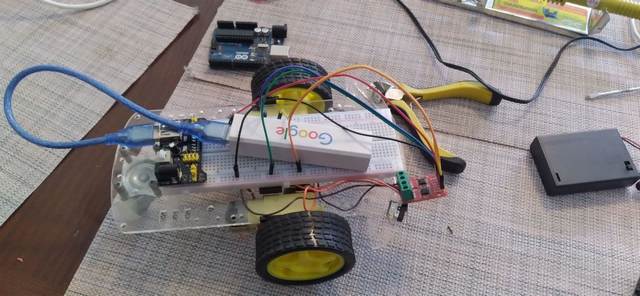
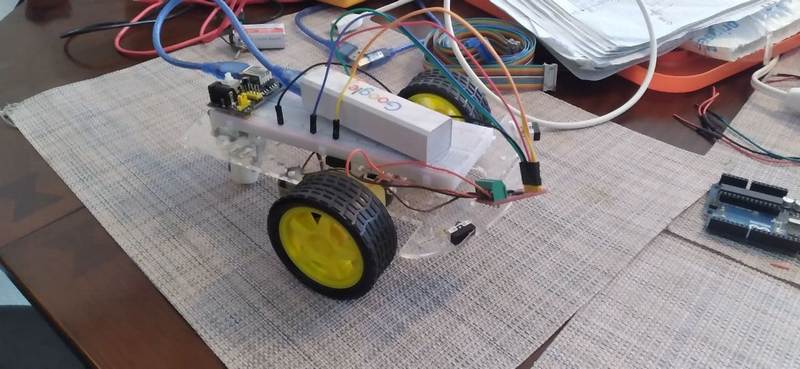
The goal of CarBot’s next upgrade is to make it able to move backwards without having to turn around. Before we do that, however, its really important to learn how a motor driver works and explore how it can be incorporated into CarBot. Here is a study of the DC motor driver board.
Materials
- breadboard
- power bank
- jumper wires
- CarBot chassis
- x2 motors

A motor driver manages the signals sent from the controller and translates them into electric impulses which are received by the motors. It connects directly to the controller and has four main outputs: two outputs for motor A, and two outputs for motor B. When the values of the two signals (per each motor) are equal the motor stops. In almost all cases it will be two zeroes/OFF values.
In this study a motor driver will be connected to an Arduino UNO and the motors using the breadboards, and a power bank will be used as a temporary power source.