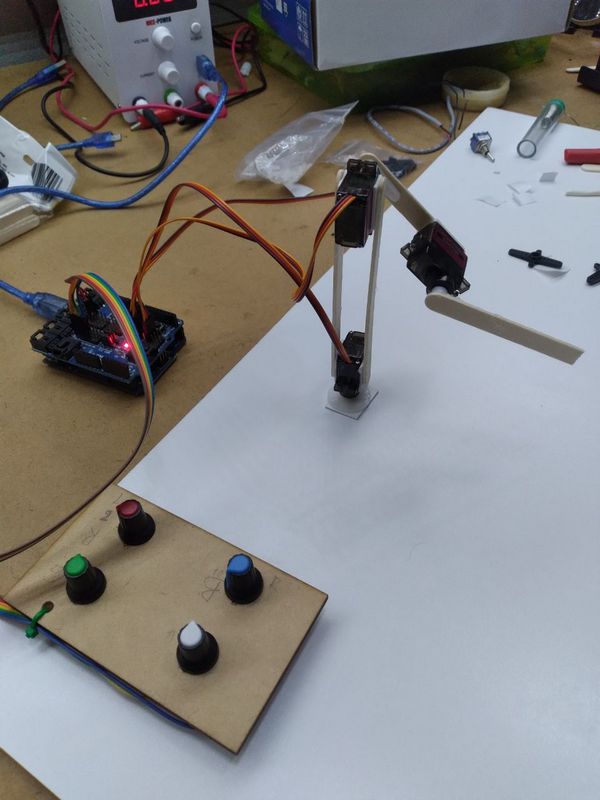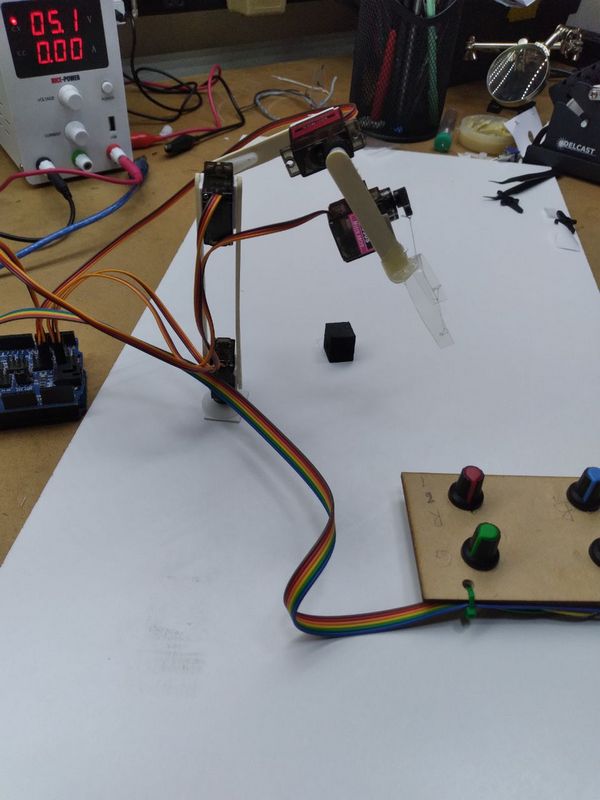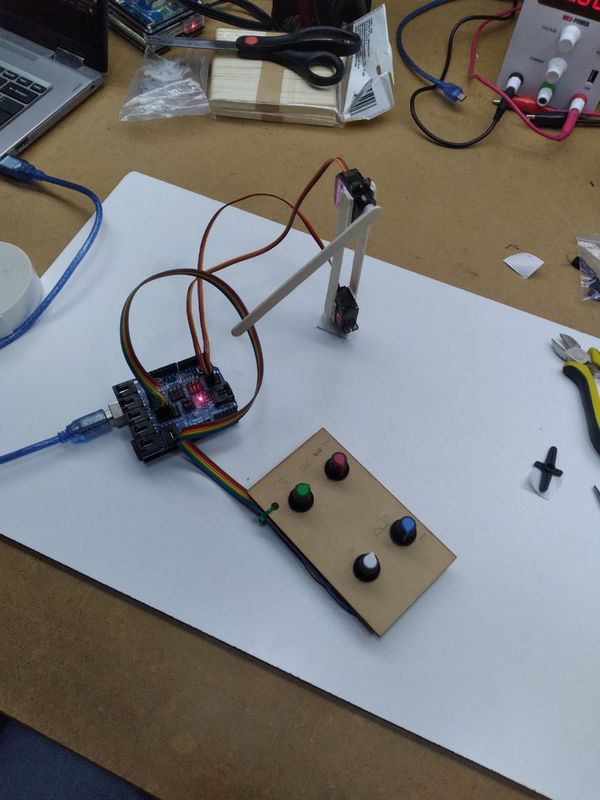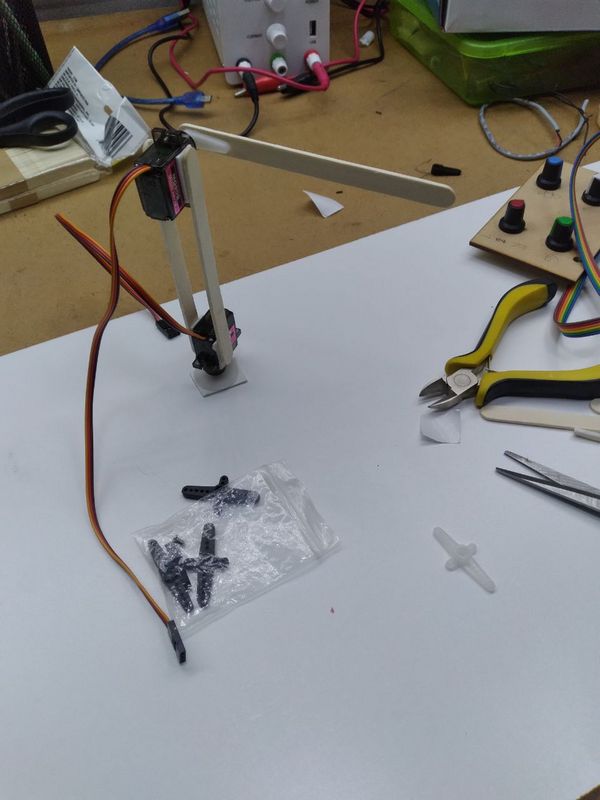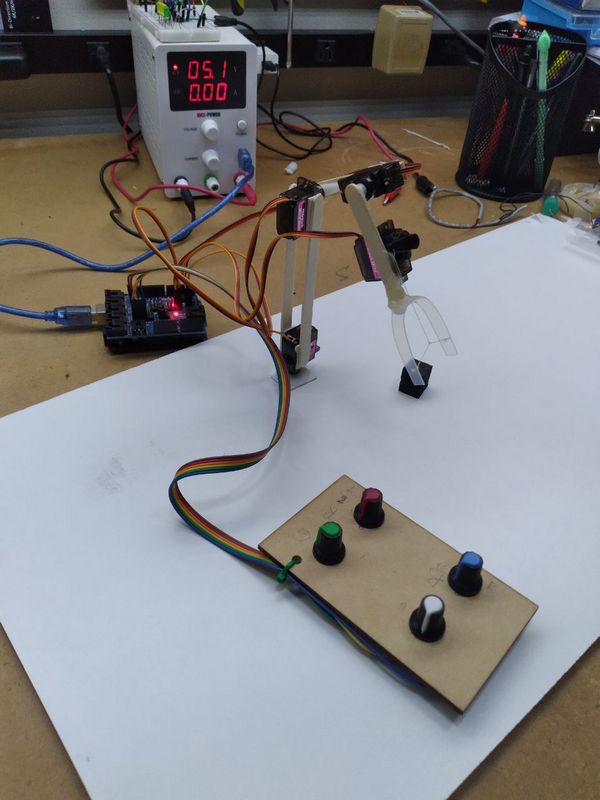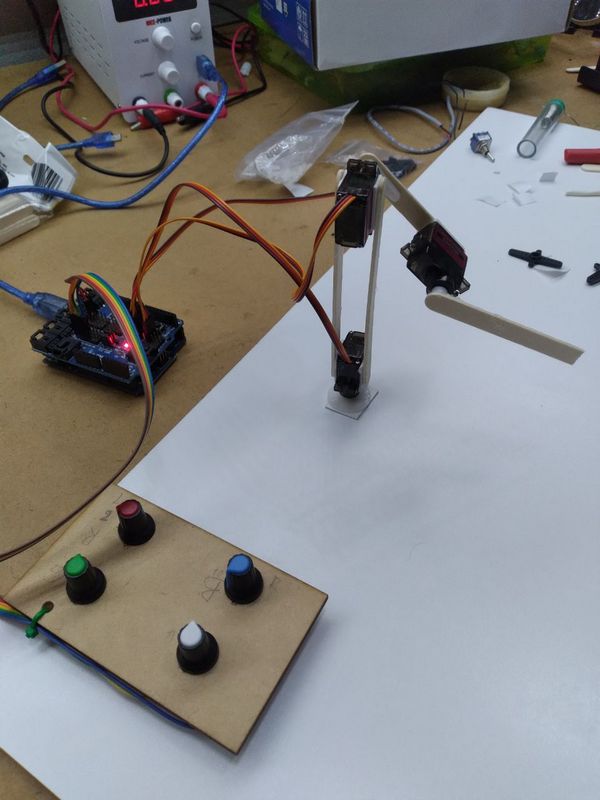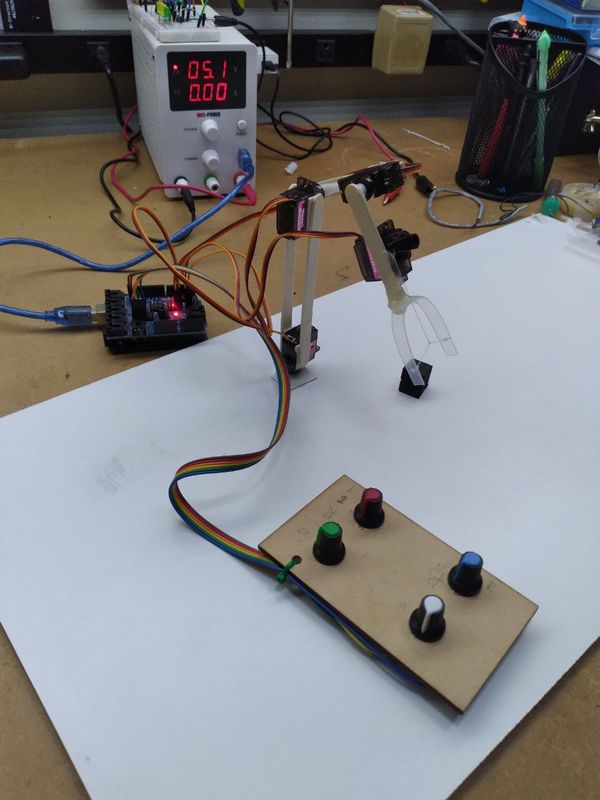
My latest project was a simplified robotic arm, made for picking up and moving very small objects. The design is made of Popsicle sticks, which are attached to servo motors with double sided tape.
Schematics
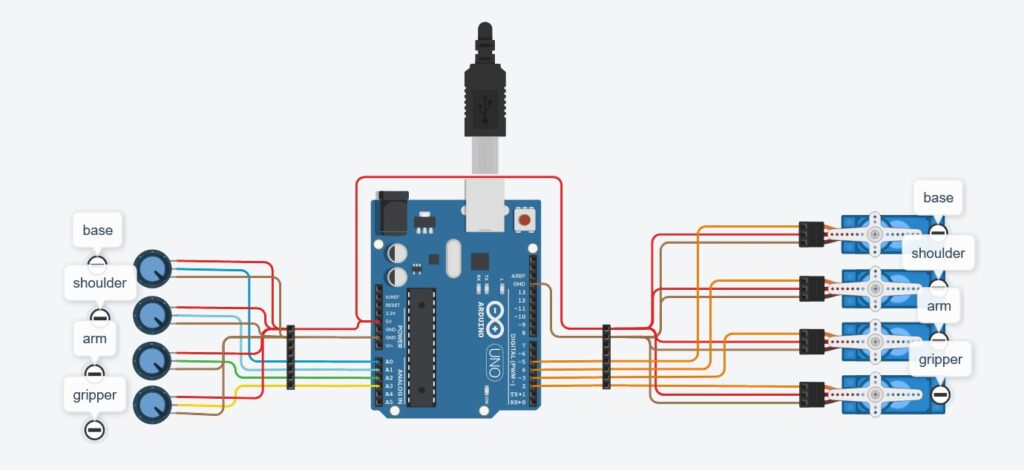
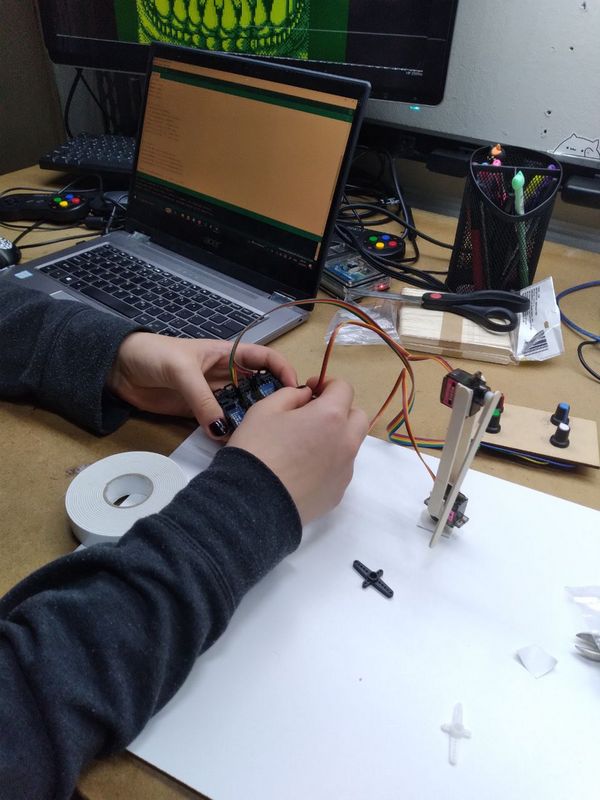
Programming
The starting point for this project was a remote made of potentiometers, which were connected to an Arduino Uno controller. I made a few optimizations, such as adding adding lists that will contain set movements in the future. The code below allows the robot arm to be controlled by three potentiometers.
#include <Servo.h>
int sensorPin = A0; // pin for potentiometer
int sensorPin1 = A1;
int sensorPin2 = A2;
int sensorPin3 = A3;
int ledPin = 13; // pin 4 LED
int sensorValue = 0; // value from sensor
int sensorValue1 = 0;
int sensorValue2 = 0;
int sensorValue3 = 0;
int deg0 = 0;
int deg1 = 0;
int deg2 = 0;
int deg3 = 0;
int recordButton = 6;
Servo base;
Servo shoulder;
Servo arm;
Servo gripper;
int baseM[] = {}; //base movement
int shoulderM[] = {}; //shoulder movement
int armM[] = {}; //arm movement
int gripperM[] = {}; //gripper movement
void setup() {
//declare the recordButton
pinMode(recordButton, INPUT_PULLUP);
base.attach(2); //base
shoulder.attach(3); //shoulder
arm.attach(4); // arm
gripper.attach(5); // gripper
}
void loop() {
// read the value from sensor
sensorValue0 = analogRead(sensorPin);
sensorValue1 = analogRead(sensorPin1);
sensorValue2 = analogRead(sensorPin2);
sensorValue3 = analogRead(sensorPin3);
deg0 = map(sensorValue0, 0, 1023, 0, 180);
deg1 = map(sensorValue1, 0, 1023, 0, 180);
deg2 = map(sensorValue2, 0, 1023, 0, 180);
deg3 = map(sensorValue3, 0, 1023, 0, 180);
base.write(deg0);
shoulder.write(deg1);
arm.write(deg2);
gripper.write(deg3); //pin 2
}