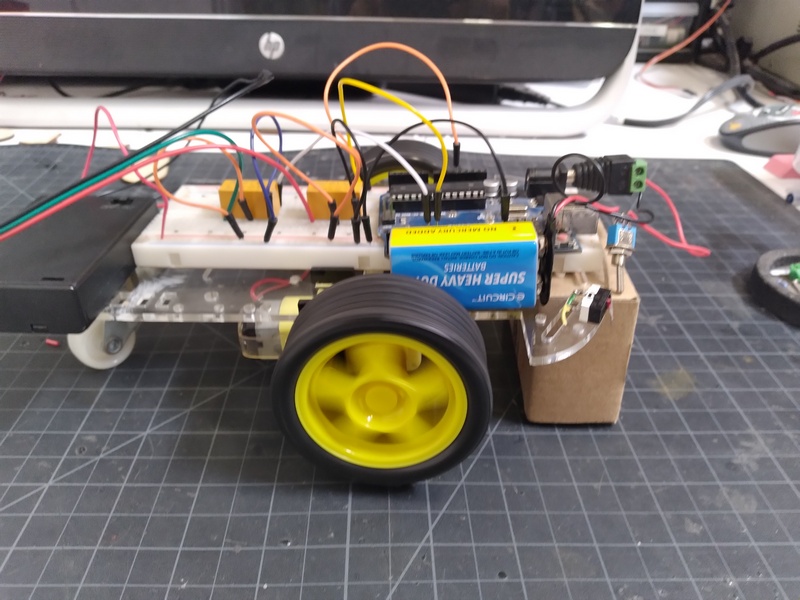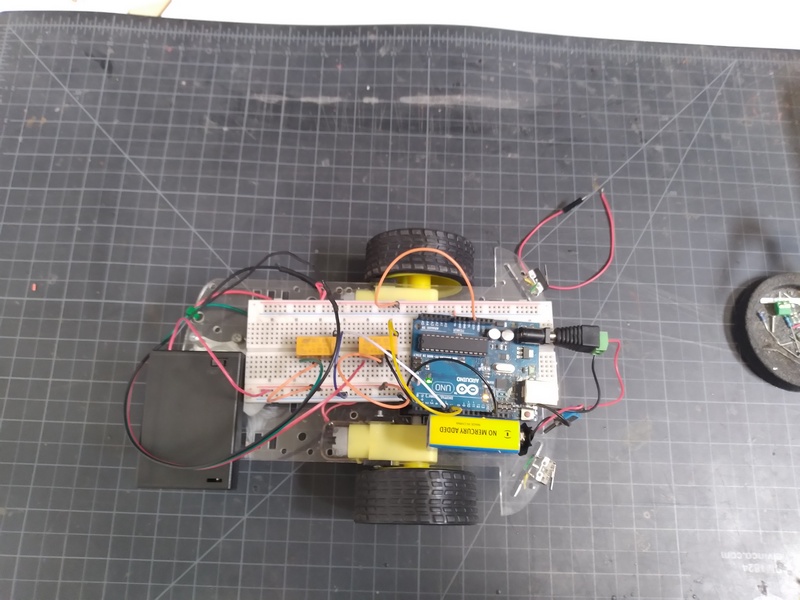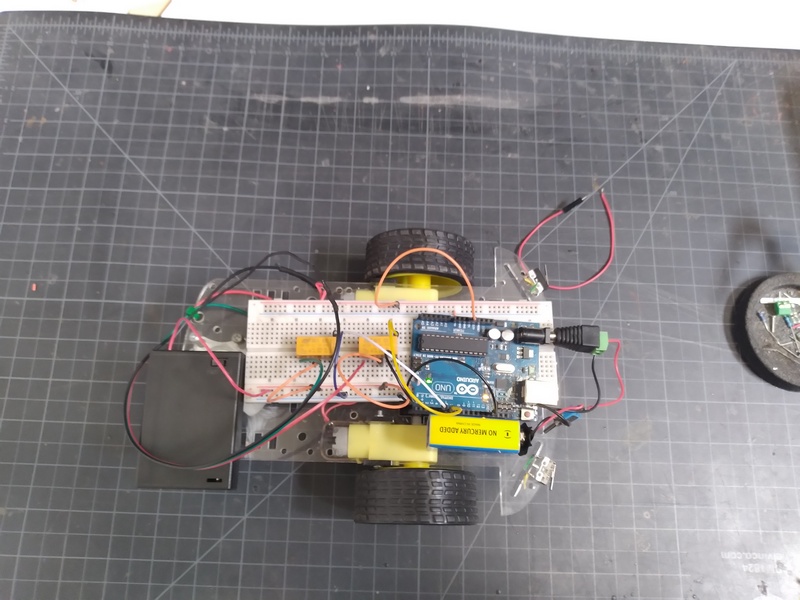
Working with Arduino can come very handy when programming robots. In this part of the project I applied some of my knowledge in Arduino programming to the CarBot project, making it able to move around using Arduino code.
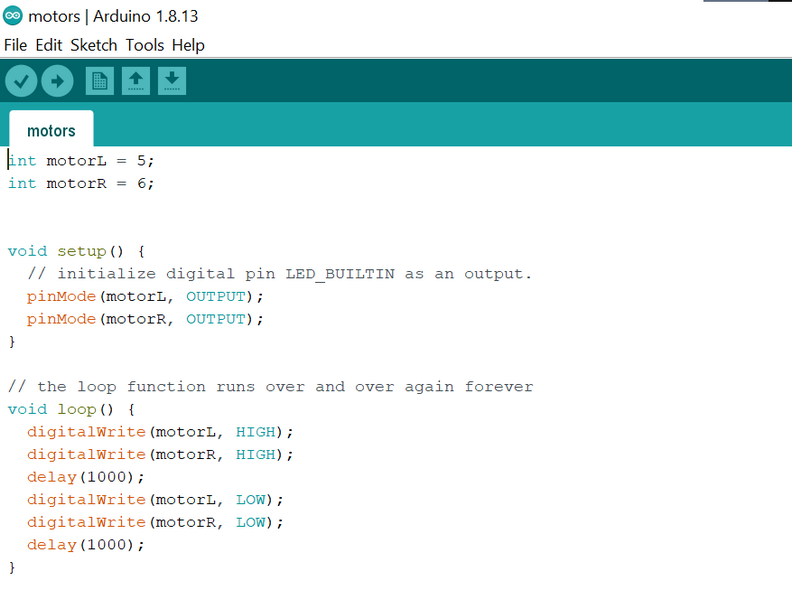
As it can be seen above, the program makes the robot go forward for 1000 milliseconds (or 1 second) and then stops for one second. this is then repeated until the program is stopped by the user.