This is a very interesting project from my Computer Science class that I thought I would share here. The premise is to create a tetrahedral kite that can collect different data such as temperature and altitude during it’s flight, and record it on to an SD card. Our class used a tutorial on NASA’s website for the main guide for creating the base of the kite.
Materials:
Main Kite:
- paper straws
- paper
- string
- hot glue
- duct tape
Circuit:
- wires
- Arduino Uno
- breadboard
- MPL3115A2 sensor
- 9 volt battery
Assembling the Kite
In order to create the kite we tied together the straws with the string to form triangular pyramids, and placed paper around two of the sides so that the kite has to push through the air. We then connected the pyramids together to form one large pyramid, made up of 10 cells.
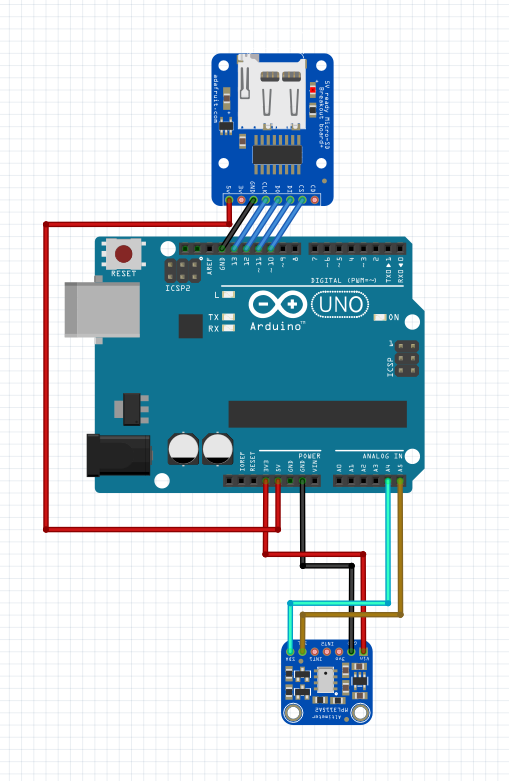
Circuit
Code
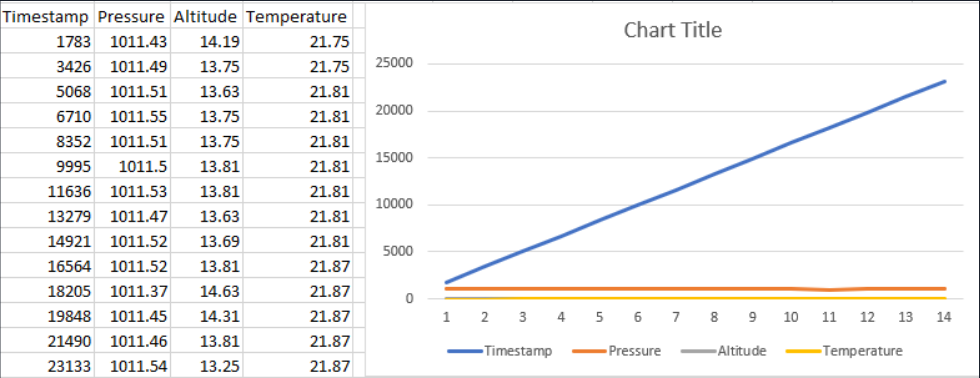
The following code collects data from the pressure, temperature, and altitude sensors 40 times, then saving it to an SD card. This code was written by Chat GPT, with a few edits on my part.
/**
* Async example for MPL3115A2
*/
#include <Adafruit_MPL3115A2.h>
Adafruit_MPL3115A2 mpl;
void setup() {
Serial.begin(9600);
while(!Serial);
Serial.println("Adafruit_MPL3115A2 test!");
if (!mpl.begin()) {
Serial.println("Could not find sensor. Check wiring.");
while(1);
}
// set mode before starting a conversion
Serial.println("Setting mode to barometer (pressure).");
mpl.setMode(MPL3115A2_BAROMETER);
}
void loop() {
// start a conversion
Serial.println("Starting a conversion.");
mpl.startOneShot();
// do something else while waiting
Serial.println("Counting number while waiting...");
int count = 0;
while (!mpl.conversionComplete()) {
count++;
}
Serial.print("Done! Counted to "); Serial.println(count);
// now get results
Serial.print("Pressure = ");
Serial.println(mpl.getLastConversionResults(MPL3115A2_PRESSURE));
Serial.print("Temperature = ");
Serial.println(mpl.getLastConversionResults(MPL3115A2_TEMPERATURE));
Serial.println();
Takeoff?
To answer that question, the kite did not take off. There were many things that could have caused this. For one, there wasn’t enough wind. Second, the kite was already very unstable before it was launched. The reason that must have affected the kite the most was the weight. Without the electronic component, the kite was able to fly fairly well. This changed when we added the electronic component of the structure. Even though there are kites heavier than ours that have flown, the real issue was the uneven distribution of weight. Due to the unconventional structure of the kite, we decided to place the board towards the back of the kite. Looking back now that wasn’t really the best decision, but at least I got to experience the engineering design process firsthand.



Data
Unable to to solder in the classroom, we had to use a breadboard to connect the controller and SD card to the sensors. Despite the instability of the wires, the module stayed together long enough to gather data from the “flight”. The data collected is demonstrated below: