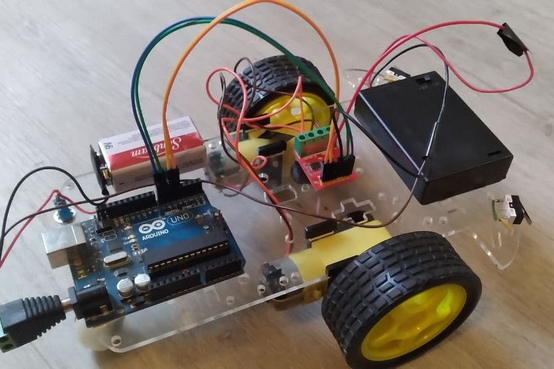
The next step in the engineering of the robot will be to avoid walls. In order to do this, it will have a touch limit switch, that will stop the corresponding motor to avoid hitting the obstacle. Placing sticks on them will make them activate before the robot hits the walls. Unfortunately, it did not work as well as it seemed it would.