The goal of the Line Follower project is to create a Lego robot that would follow along a line. The extra challenge was to use only one color censer.

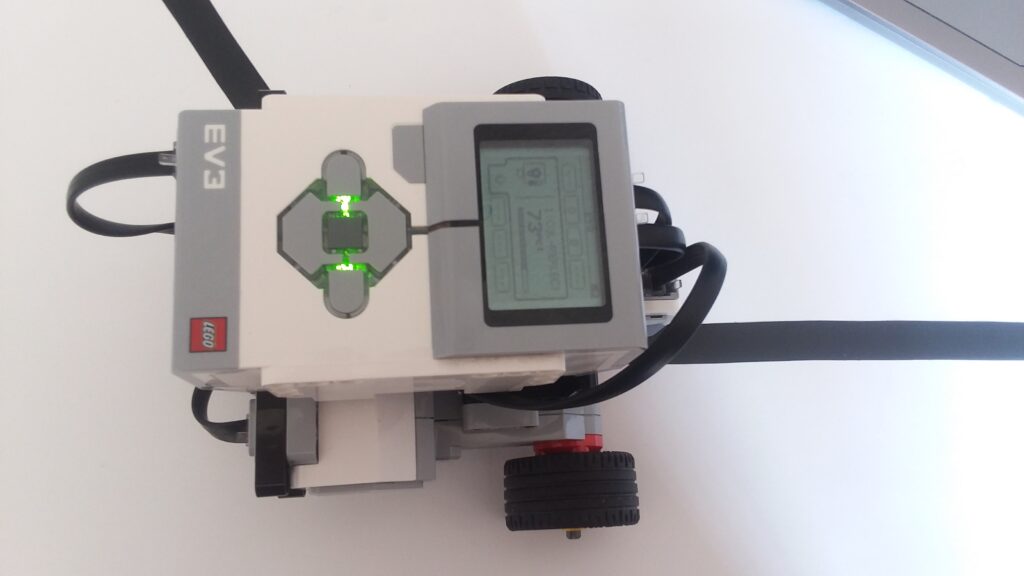
The base of this robot is a simple two wheeled construction allowing a high verity of movement in all direction. It consists of the following parts:
- An EV3 Brick
- Color censor
- Two wheeled motors
- Roller ball
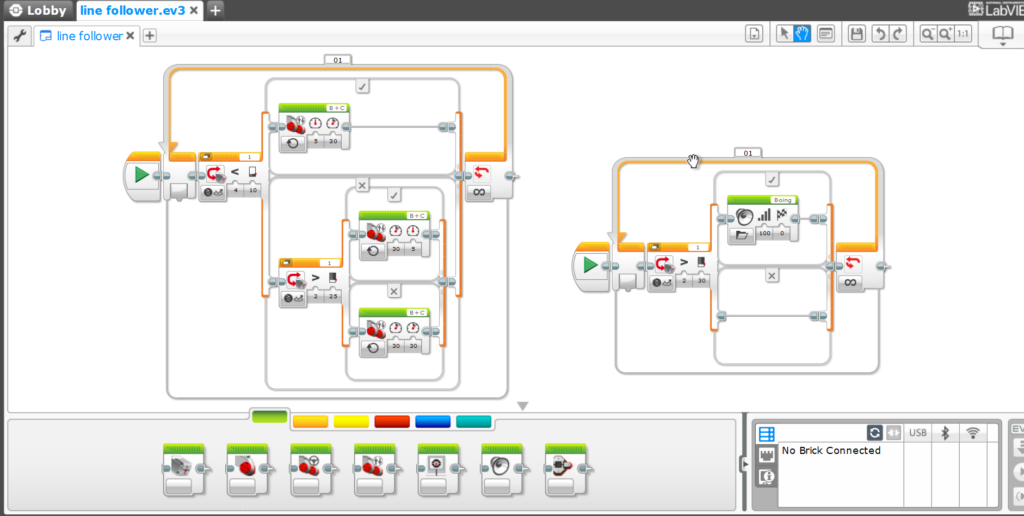
The main idea for the one censor project to work is different from the common way of line follower programming. Instead of using two censors to indicate any black light and then turn the opposite way, this line follower robot is placed with the one censor halfway on the black part of the line, and halfway on the white floor. This allows it to receive a signal that is half the signal for the black color, and half the signal for the white color, meaning that the output will be the number in between the two contrasting outputs. Furthermore, as the robot moves forward, it will steer to the opposite side of the color value that is increasing.
The EV3 light censor provides a couple of different modes to work in.
- Reflected Light Intensity Mode
- Ambient Light Intensity Mode
- Color Mode
This project requires the Reflected Light Intensity Mode for it to be able to work. It provides a signal that can be read as a number value. The robot was programmed using the Mindstorms original softare.