
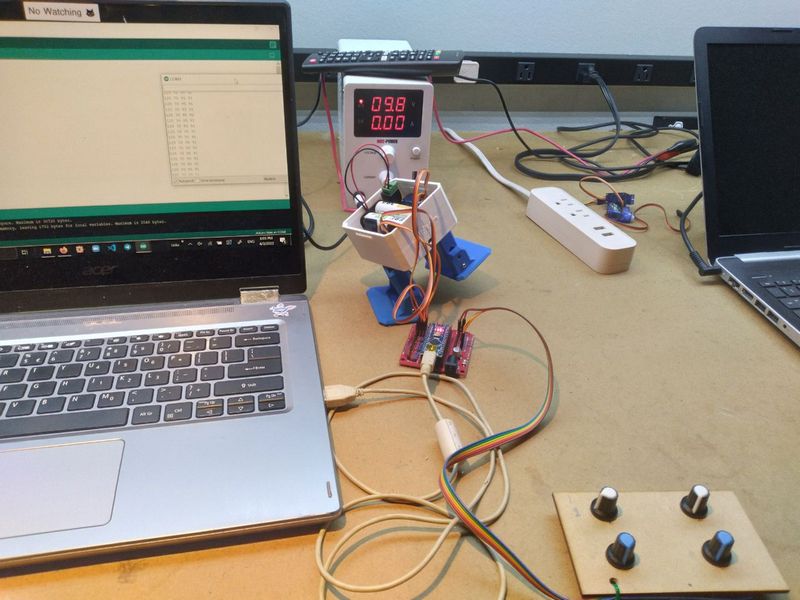
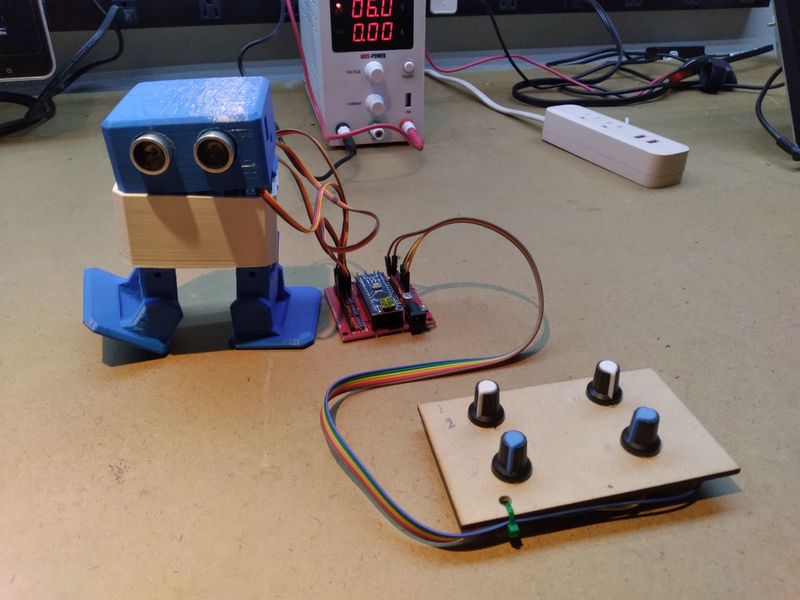
After testing a program using the Otto blockly software, the next step was to manually teach it to walk. I used the set up with my remote, and connected it to each of the four servos of the robot. Using the serial monitor, it will be easy to record the positions of the servos. This will be done in order to include certain positions of the robot in the code.
Here is a video of me testing the walk cycle programmed within the Otto blockly software.